CHANGES IN VERSION 2.14 SINCE VERSION 2.13.3
Major changes
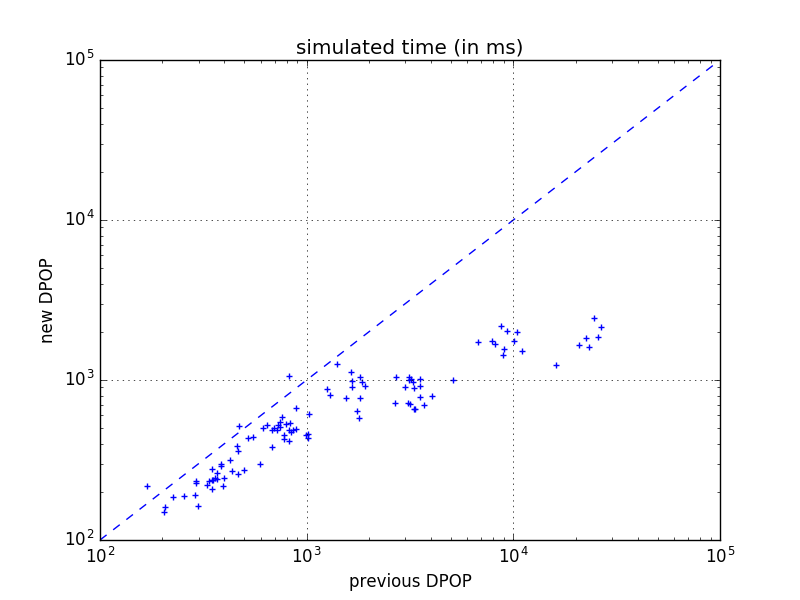
- Major performance improvement in the way DPOP's UTIL messages are implemented in JaCoP (performance issue reported by Chirag Vartak). UTIL lookups are now cheaper (constant instead of linear in the number of allowed tuples), resulting in multiple-times speedups - see chart below on graph coloring problems.
- Fixed a bug in the random graph coloring problem generator, following which the unary constraints (when tightness > 0) used an inconsistent color numbering convention (bug reported by Duc Thien Nguyen).
Minor changes
- DUCT now reports the cost/utility of the solution it returns.
- In distributed submode, daemons now report which agents they own (request by Roger Tang).
- Improvements to the error messages that could be thrown in advanced mode (support request by Roger Tang).
- The XCSP parser now checks for unique constraint names when asserts are enabled (reported by Dipankar Niranjan).
- User manual: fixed a few mistakes about Multi-Agent Systems (following a request for support by Partha Protim Mondal).
- User manual: added information about the distributed submode (request by Roger Tang).
Performance improvements
The graph below reports the performance of DPOP in FRODO version 2.14 against version 2.13.3 on random graph coloring problems, with intensional, soft constraints, density 0.4, 3 colors, and from 14 to 18 nodes.